
робот бульдозер
Когда говорят ?робот-бульдозер?, многие сразу представляют дистанционный пульт и камеру. Это, конечно, часть правды, но лишь верхушка айсберга. На деле, ключевой сдвиг — в интеграции систем позиционирования, датчиков и, что важнее, алгоритмов, принимающих решения в реальном времени. Видел я проекты, где машину просто оснастили телематикой и назвали ?роботом? — толку ноль. Настоящая автономность начинается, когда система сама корректирует отвал по данным лидара и гибридной GNSS-сети, а оператор лишь ставит задачи контуру.
От ?железа? к ?софту?: где кроется реальная сложность
Основа — шасси. Берем серийный бульдозер, допустим, Четра Т35 или аналог. Казалось бы, ставь приводы руля и рычагов, контроллер — и готово. Но здесь первый подводный камень: гидравлика. Штатная система не рассчитана на высокочастотные дискретные сигналы от ПЛК. При резком цифровом сигнале ?поднять/опустить? получаются рывки, перегрузка насосов. Приходится ставить промежуточные буферные блоки с обратной связью по давлению, а это уже глубокая переделка. Без этого робот либо дергается, либо медлит как черепаха.
Второй пласт — навигация. RTK-GPS — это стандарт, но на стройплощадке с кранами, высокими объектами бывают потери сигнала. Поэтому комбинируем с инерциальной системой (IMU) и, что реже упоминают, с корректировкой по прецезионным контурным картам. Заливаешь в систему 3D-модель участка, и даже при временном пропадании спутников машина продолжает движение по виртуальным рельсам с точностью до 5 см. Но тут есть нюанс: такая модель требует предварительной высокоточной аэрофотосъемки или лазерного сканирования, что удорожает подготовку. Для разовых работ невыгодно.
И третий, самый капризный элемент — программное ядро. Это не просто автопилот по прямой. Алгоритмы планирования движения должны учитывать изменение плотности грунта (по сопротивлению движению и вибрациям), избегать локальных проседаний, динамически перестраивать маршрут, если на пути обнаружился неучтенный валун (лидар + стереокамера). Писалось такое ПО часто на ROS (Robot Operating System), но для промышленного применения приходится ?заворачивать? его в более надежные оболочки, сертифицировать. Много времени уходит на обучение нейросети распознаванию типов препятствий: куча песка — проехать можно, бетонный блок — объехать, человек — остановиться. Ложные срабатывания были бичом ранних моделей.
Кейс из практики: когда теория столкнулась с глиной
Был у нас проект на рекультивации полигона. Задача — роботу-бульдозеру равномерно распределять и уплотнять суглинок. Машина отработала два дня идеально, но после дождя все пошло наперекосяк. Датчики на колесах (отслеживавшие пробуксовку) забились грязью, лидар ?ослеп? от капель на корпусе, а влажный грунт налипал на отвал, меняя его геометрию и массу. Система, не получая четких данных, начала делать странные циклические движения. Пришлось экстренно выводить в ручной режим.
Выводы были просты и сложны одновременно: нужна регулярная самоочистка датчиков (продувка воздухом, вибрационные крышки) и, что важнее, алгоритмы должны учитывать ?коэффициент грязи? — косвенные признаки изменения условий. Например, рост энергопотребления при той же скорости и уклоне может сигнализировать о налипании. Добавили в логику адаптивные поправки. Это не было прописано в техзадании изначально — пришло с опытом.
Еще один момент — взаимодействие с другими машинами. На той же площадке работал автосамосвал. Для эффективной работы робот-бульдозер должен был ?понимать?, где самосвал выгрузит материал, и подъезжать к месту, не создавая простоев. Решили через общую локальную сеть и протокол M2M. Но возникла задержка в обмене данными — бульдозер иногда приезжал к уже разгруженной куче. Пришлось настраивать приоритеты каналов и вводить прогнозирование: если самосвал замедлился у зоны выгрузки с поднятым кузовом, робот начинает движение заранее.
Экономика и ниши: где это действительно окупается
Автономный бульдозер — не панацея для всех задач. На обычной стройке с меняющимся ландшафтом, множеством рабочих, частыми изменениями проекта, его преимущества могут нивелироваться сложностью адаптации. Главная ниша — это монотонные, объемные работы в опасных или труднодоступных условиях. Рекультивация земель, работа на отвалах карьеров, подготовка оснований под большие склады, где площадь огромна, а план стабилен.
С точки зрения экономики, основная статья экономии — не зарплата оператора (хотя и она значима), а увеличение времени полезной работы. Машина не устает, не требует пересменки, может работать в три цикла практически без остановок, кроме ТО и заправки. Плюс — точность. Перерасход материала из-за человеческого фактора снижается. Но высоки капитальные затраты на переоборудование и, повторюсь, на подготовку цифровой модели площадки.
Интересный вектор — интеграция с системами экологического мониторинга. Например, если бульдозер используется на объекте рекультивации, он может быть носителем датчиков контроля состояния грунта, газоанализаторов. Данные в реальном времени дополняют картину работ. В этом контексте вижу логику в подходе компаний, которые развивают экологические технологии комплексно. Вот, например, ООО Группа Цзянсу Чжунтай Экологические Технологии (сайт: https://www.zthb.ru). Они, судя по описанию, фокусируются на глубинной разработке экологического оборудования и накоплении технологических патентов. Такой подход как раз созвучен идее ?умной? техники: робот-бульдозер на таком объекте — не просто трактор, а элемент цифровой экосистемы, собирающий данные для последующего анализа и оптимизации процессов восстановления земель. Их заявленные более 20 ключевых технологий могли бы включать как раз решения в области датчиков и систем управления для подобной спецтехники.
Будущее: конвергенция с беспилотными карьерами
Тренд очевиден: единичные роботизированные машины будут вытеснены целыми автономными комплексами. Бульдозер, самосвал, каток, работающие как один организм. Уже сейчас есть пилотные проекты, где планировщик задач распределяет работу между машинами, минимизируя их пересечения и простои. Для бульдозера это означает переход от задач ?выровнять эту зону? к ?подготовить путь для самосвала №3, исходя из его текущей загрузки и маршрута?.
Главный технологический барьер здесь — единый стандарт связи и протоколов. Каждый производитель тяготеет к своему ?замку?. Нужна отраслевая инициатива, что-то вроде адаптации формата ISO 15143 для систем взаимодействия. Без этого интеграция машин разных брендов будет костылями и затратами.
И последнее — безопасность. Физические барьеры, зоны отчуждения — это прошлый век. Будущее за динамическим виртуальным ограждением (geofencing), которое меняется в реальном времени в зависимости от задачи и присутствия других объектов. Если в зону работы робота-бульдозера зашел человек со специальным маячком, машина не просто останавливается, а перепланирует свой маршрут, освобождая коридор. Такие системы уже тестируются, но их надежность должна быть на уровне 99.99%, а это вопрос уже не инженерии, а культуры производства и строжайших регламентов.
Вместо заключения: мысли вслух
Роботизация в земляных работах — это не скачок, а эволюция. Каждый проект добавляет в копилку понимания: где можно положиться на алгоритм, а где нужен человеческий глаз и интуиция. Самый ценный урок — машина должна быть не просто автоматической, а адаптивной. И эта адаптивность рождается не в чистом офисе, а на грязной площадке, когда инженер с ноутбуком сидит в кабине рядом с оператором и вместе они разбирают, почему робот повел себя странно у той самой рыхлой кучи.
Технологии, подобные тем, что развивает ООО Группа Цзянсу Чжунтай Экологические Технологии, важны как фундамент. Накопление патентов и глубокие разработки в смежной области — экологическом оборудовании — создают почву для синергии. Датчик контроля состава грунта, разработанный для мониторинга, может стать ?органами чувств? для робота-бульдозера на рекультивации. Это и есть путь к настоящей интеллектуальной машине.
Так что, когда в следующий раз услышите ?робот-бульдозер?, думайте не о пульте. Думайте о сложной сети решений, датчиков и алгоритмов, которые медленно, но верно учатся чувствовать землю, по которой едут. И в этом — вся соль.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
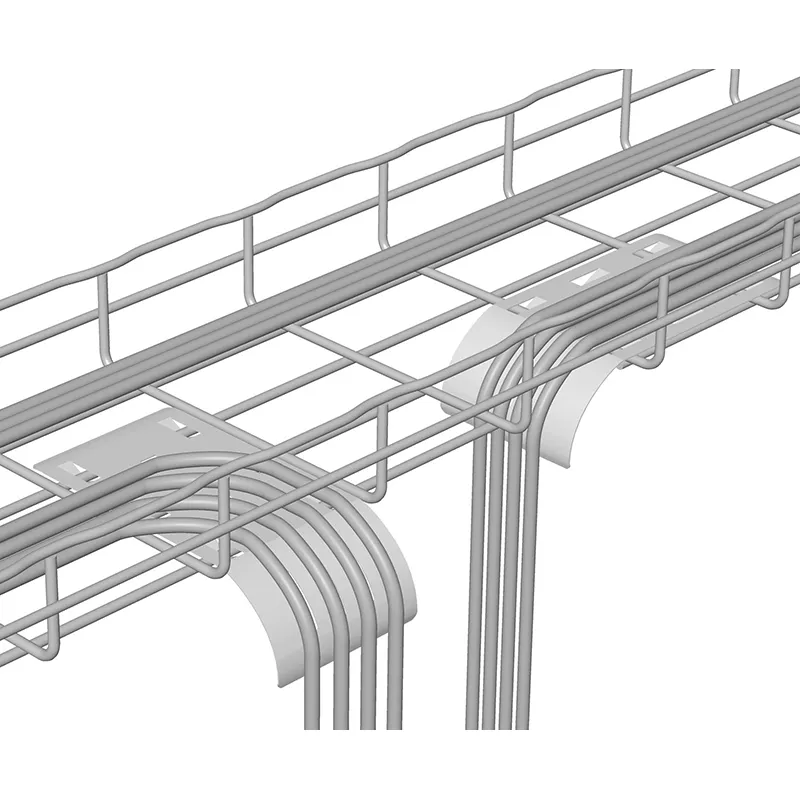
 Лотковый кабельный лоток
Лотковый кабельный лоток -
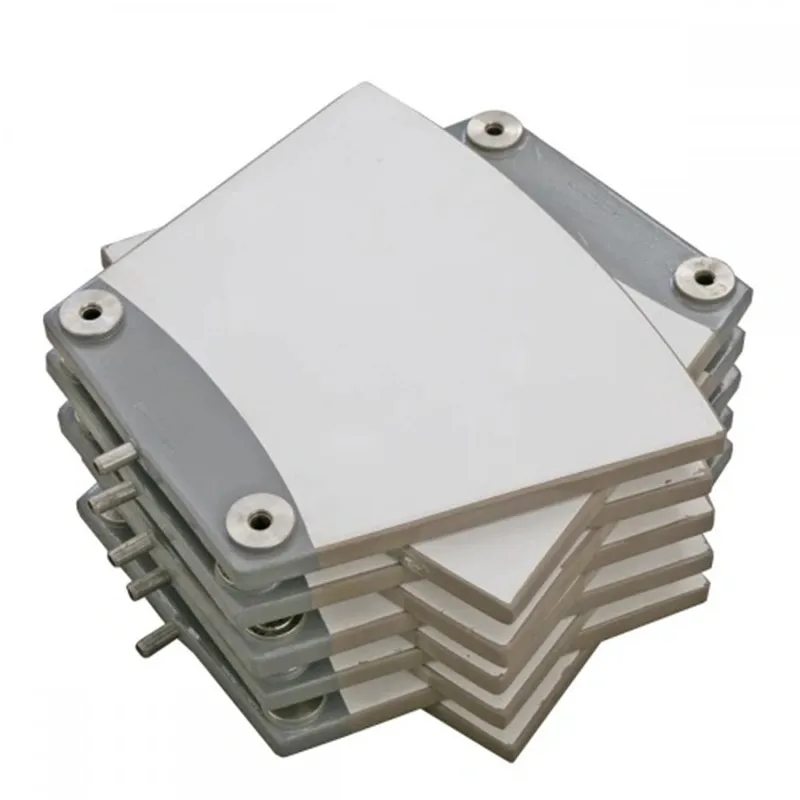
 Керамическая фильтрующая пластина площадью 12 квадратный метр
Керамическая фильтрующая пластина площадью 12 квадратный метр -
 Лотковый кабельный лоток
Лотковый кабельный лоток -
 Керамическая фильтрующая пластина площадью 1 квадратный метр
Керамическая фильтрующая пластина площадью 1 квадратный метр -
 Трубчатая керамическая мембрана
Трубчатая керамическая мембрана -
 Керамическая фильтрующая пластина площадью 4 квадратный метр
Керамическая фильтрующая пластина площадью 4 квадратный метр -
 Жёлоб
Жёлоб -
 Кабельный лоток лестничного типа
Кабельный лоток лестничного типа -
 Бурильная машина
Бурильная машина -
 Погрузчик
Погрузчик -
 Спиральный классификатор
Спиральный классификатор -
 Отсадочная машина
Отсадочная машина
Связанный поиск
Связанный поиск- карьерные буровые установки
- Шинопровод магистральный компактного исполнения
- конусная дробилка для щебня
- погрузочно уборочная машина
- гидравлические экскаваторы большие
- щековая дробилка полумобильная
- карьерный самосвал 90 тонн
- лучший карьерный самосвал
- Кабельный лоток лестничного типа
- погрузочно транспортирующая машина



